Edit:
I have to disappoint, as I just couldn't find time. Can test thursday evening at the earliest.
Moderators: jsmcortina, muythaibxr
 edit:
edit: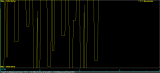
Code: Select all
if (++adc_count == 64)
{
adc_count = 0;
// convert accumulated value to mean kPa x 10.
// outpc.baro = flash4.baro0 + (long)
// ((flash4.baromax - flash4.baro0)*accum_baro / 65536)
__asm__ __volatile__ (
"ldd %1\n"
"subd %2\n"
"ldy %3\n"
"emul\n"
"tfr y,d\n"
"addd %2\n"
: "=d"(outpc.baro)
: "m"(flash4.baromax),
"m"(flash4.baro0),
"m"(accum_baro)
: "y", "x");
if (outpc.baro < flash4.baro_lower) {
outpc.baro = flash4.baro_lower;
} else if (outpc.baro > flash4.baro_upper) {
outpc.baro = flash4.baro_upper;
}
accum_baro = 0;
}
Do you need this? If your MAT / CLT is fluctuating that fast, something is seriously wrong.Dennis_Zx7r wrote:Let me say it this way. I'll try adapting this for MAT and CLT tomorrow
Is it all that bad? Output of objdump -h megasquirt2.elf includes:jsmcortina wrote:All good info. I'm not sure if there's enough free RAM to do this though, the last time ai checked it was extremely close.
Code: Select all
Idx Name Size VMA LMA File off Algn
11 .bss 00000e0d 00003000 00003000 00001000 2**0
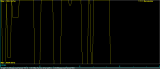
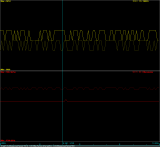
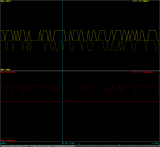
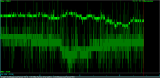
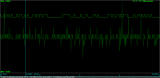
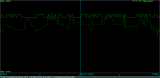
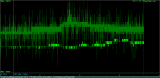
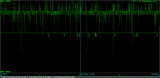
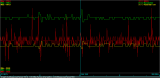
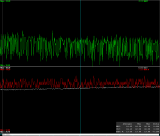
I'm talking about this level of noise:dontz125 wrote:Do you need this? If your MAT / CLT is fluctuating that fast, something is seriously wrong.Dennis_Zx7r wrote:Let me say it this way. I'll try adapting this for MAT and CLT tomorrow
Code: Select all
>> dis -l 5 a 38:8127
ISR_Ign_TimerIn_paged:
38:8127 1b f1 ea LEAS -22,SP
38:812a 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
38:812f 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
38:8134 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 39:88a6
calc_advance:
39:88a6 1b f1 ed LEAS -19,SP
39:88a9 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
39:88ae 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
39:88b3 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 39:8daf
calc_rpmdot:
39:8daf 1b f1 ea LEAS -22,SP
39:8db2 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
39:8db7 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
39:8dbc 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 39:9f38
handle_spareports:
39:9f38 1b f1 ef LEAS -17,SP
39:9f3b 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
39:9f40 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
39:9f45 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 39:ab8c
sample_map_tps:
39:ab8c 1b f1 ea LEAS -22,SP
39:ab8f 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
39:ab94 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
39:ab99 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 39:b74e
idle_closed_loop_pid:
39:b74e 1b f1 e6 LEAS -26,SP
39:b751 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
39:b756 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
39:b75b 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 3a:8136
ign_wheel_init:
3A:8136 1b f1 da LEAS -38,SP
3A:8139 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
3A:813e 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
3A:8143 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 3b:83d4
boost_ctl:
3B:83d4 1b f1 e3 LEAS -29,SP
3B:83d7 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
3B:83dc 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
3B:83e1 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 3b:aa52
calc_staged_pw:
3B:aa52 1b f1 d0 LEAS -48,SP
3B:aa55 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
3B:aa5a 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
3B:aa5f 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 3c:8814
ego_closed_loop_pid_dopid:
3C:8814 1b f1 ec LEAS -20,SP
3C:8817 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
3C:881c 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
3C:8821 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 3d:8000
main:
3D:8000 1b f1 d6 LEAS -42,SP
3D:8003 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
3D:8008 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
3D:800d 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 3d:aae2
do_spkmode:
3D:aae2 1b f1 9a LEAS -102,SP
3D:aae5 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
3D:aaea 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
3D:aaef 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 5f95 (5f81:CanRxIsr)
3E:5f95 1b f1 e6 LEAS -26,SP
3E:5f98 7f 30 06 STS 0x3006 ; _.frame
3E:5f9b 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
3E:5fa0 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
3E:5fa5 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,
>> dis -l 5 a 6830 (682b: serial)
3E:6830 1b f1 c5 LEAS -59,SP
3E:6833 7f 30 06 STS 0x3006 ; _.frame
3E:6836 18 01 ae 30 08 MOVW 0x3008,2,-SP ; _.d1,
3E:683b 18 01 ae 30 0a MOVW 0x300a,2,-SP ; _.d2,
3E:6840 18 01 ae 30 0c MOVW 0x300c,2,-SP ; _.d3,