This modified firmware is based on the alpha release MS2/Extra 3.3.0b firmware and adds some further enhancements/fixes - notably the addition of a "TPS Averaging" oversampler similar to the MS3 MAP averaging sample method, and "Adaptive PID" that reduces PID values as idle rpm target is reached.
Changes made from alpha release MS2/Extra 3.3.0b are as follows:
* added TPS averaging oversampler (better noise smoother than LF and Median)
* added separated LF for batt and clt/mat (allows batt to run at 75+ LF for idle voltage comp)
* fixed Adaptive Idle Volt Compensation to use a better baseline response window (try window > 10)
* added optional tpsDOT Smoothing (moving anchor idea from Rob's Noisy tpsDOT post)
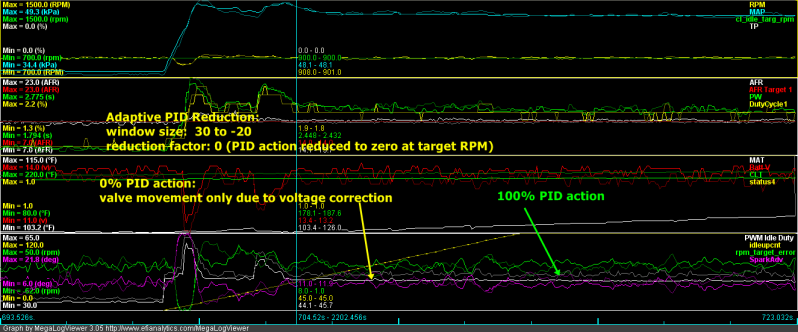
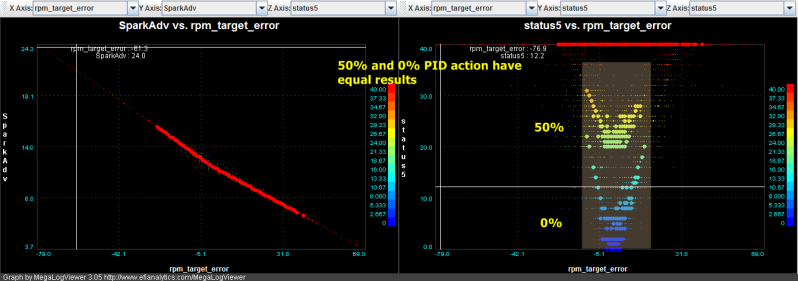
* added adaptive pid (allows for very quiet PID based idle duty and yet have aggressive PID values for when load appears)
* added back the original RPM based median sliding window (due to popular requests)
* minor memory re-jiggling, housekeeping and clean-up
* fixed map avg sampling to work/sample before engine running
* fixed window smoothing oversized bug
Firmware >> Docs >> Source >> Enjoy
G